回零功能¶
1.1 简介¶
本章主要介绍运动控制器的标准回零功能,又称Standard Home。Standard Home是根据《BS EN 61800-7-201:2008》标准,实现了基于CANOpen的驱动电机的36种回零方式,把原来较为繁琐的回零过程固化到控制器,只需要调用简单指令就能够实现回原点,简化了用户程序。
1.2 指令说明¶
| 指令 | 说明 |
|---|---|
| GTN_ExecuteStandardHome | 启动Standard Home实现各种方式回原点。 |
| GTN_GetStandardHomePrm | 读取设置到控制器的Standard Home回原点参数。 |
| GTN_GetStandardHomeStatus | 读取Standard Home回原点的状态。 |
1.3 重点说明¶
1. 所有回零操作认为正限位是在规划位置不断增加的方向,负限位是在规划位置不断减小的方向,例如:规划运动从0(脉冲)运动到1000(脉冲),即为朝着正限位方向,规划运动从0(脉冲)运动到-1000(脉冲),即为朝着负限位方向。
2. 回零前控制器会自动清零当前位置,回零完成后是否需要自动清零,可以在调用GTN_ExecuteStandardHome指令启动回零时通过参数设置来决定是否自动清零控制器的规划位置和编码器的实际位置。
3. 由于不同电机的响应特性不一致,规划停止运动后,电机到位的时间也不一致,因此就需要用户根据实际电机的跟随特性来设置相关参数判断电机是否到位。判断电机到位的方式有两种:
(1) 根据到位延迟周期判断。用户可以设置规划到位后,再等多少周期后,再取判断编码器是否到位,认为编码器到位的条件是规划位置和编码器位置差值不大于5个脉冲。
(2) 根据编码器到位误差带及到位持续周期进行判断,用户通过GTN_SetAxisBand指令设置编码器到位误差带及到位持续周期,规划到位后,判断编码器进入误差带并持续相应的周期数,认为编码器到位。
用户通过GTN_ExecuteStandardHome指令中的参数选择其中一种即可。
4. 回零过程中如果规划器和编码器方向相反或者当量不一致,即电机到位后,通过GTN_GetPrfPos获取的规划位置和GTN_GetEncPos获取的编码器位置值偏差不在合理的范围内(一般为1~2个脉冲),则回零会失败。用户可以通过执行一段微小运动等电机到位时调用上述两条指令查看相关位置的偏差情况,也可以通过回零时设置自检参数让控制器自行判断(自检时也需要设置相关参数判断电机是否到位)。
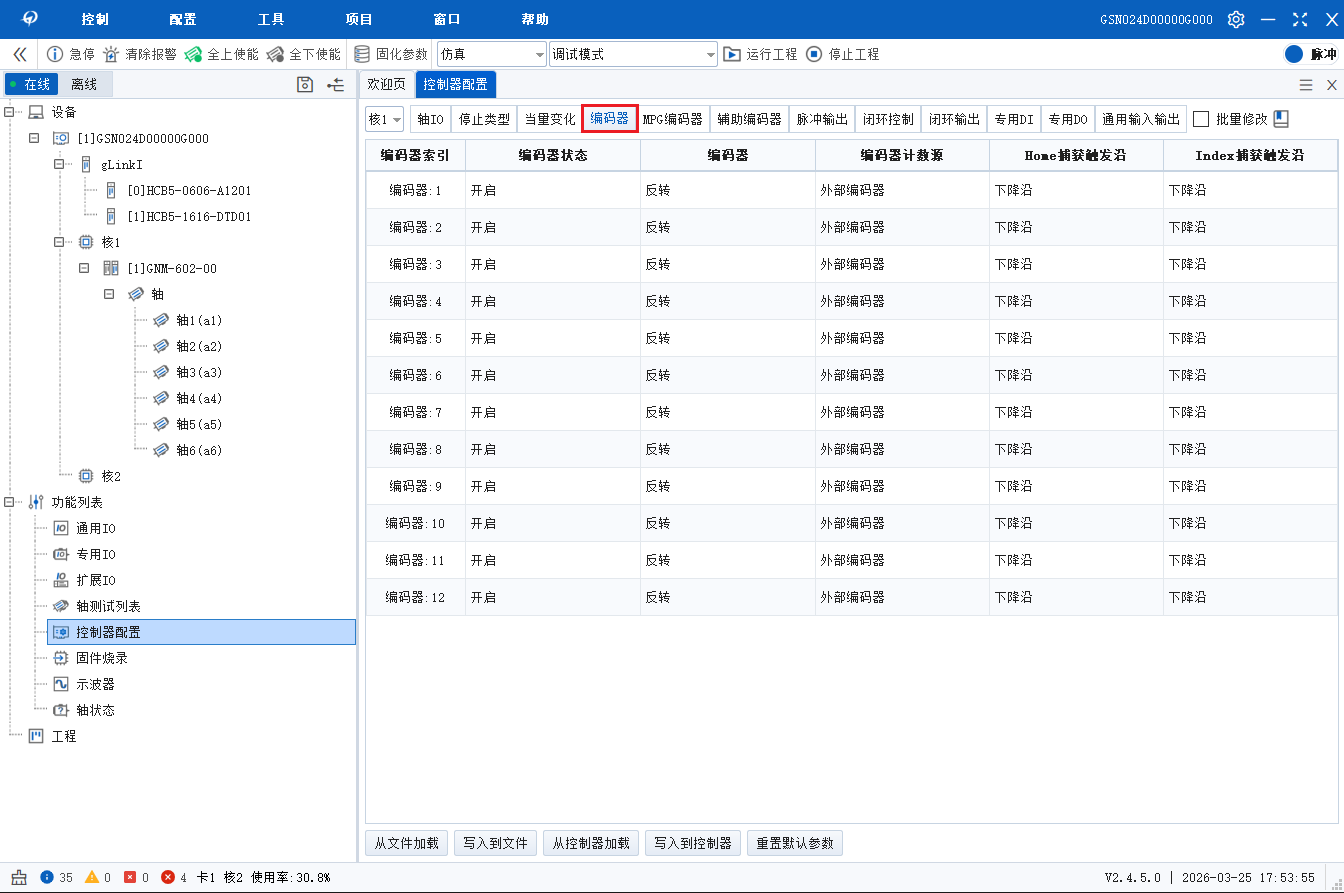
(1) 如果编码器方向和规划器方向相反,可通过MotionStudio工具软件“控制器配置” → “编码器”(如图所示)设置正确的方向,生成配置文件,然后调用GTN_LoadConfig下载配置文件使设置生效。或直接调用指令GTN_SetSense设置使得两者方向一致。
(2) 如果编码器位置和规划器位置的脉冲当量不一致,建议取消控制器当量配置,通过驱动器设置脉冲当量。
5. 上述第2项和第4项中,控制器可以完成“自动清零”和“自检”。启用了 “自动清零”和“自检”,又没有设置判断电机到位相关参数,控制器会报错。如果用户对电机响应特性并不是很了解,建议不要使用“自动清零”或“自检”功能。设置判断电机到位的参数有2种方法:
(1) 调用GTN_ExecuteStandardHome设置了motorStopDelay参数。
(2) 调用GTN_SetAxisBand设置电机到位误差带。
6. 回零时要查看回零状态,如果发现电机不动了,并已经运动到设定的位置,但是回零状态没有显示回零完成,请检查Home开关和限位开关等硬件接线是否异常。
7. 关于Home及限位开关的触发边沿,用户配置好Home、限位开关的电平后,不需要考虑上升沿、下降沿,控制器根据配置及回零模式自动设置。上述涉及的正边沿、负边沿与上升沿、下降沿不是同一个概念,它们不考虑电平的高低,仅仅是指传感器的左右两侧,默认运动为负方向的一边为负边沿,运动正方向的一边为正边沿。
8. 常开与常闭,如果Home开关为常开,则选择Home DI的reverse应该为1;如果Home开关为常闭,则选择Home DI的reverse应该为0。从站DI默认低电平有效(无论上位机配置的DI取反与否),因此Home开关触发时,电平由高变为低,为下降沿触发;离开Home开关时,电平由低变成高,为上升沿触发,如表所示。
| Home类型 | reverse设置 | 触发时的沿 | 离开时的沿 |
|---|---|---|---|
| 常开 | 1 | 下降沿 | 上升沿 |
| 常闭 | 0 | 下降沿 | 上升沿 |
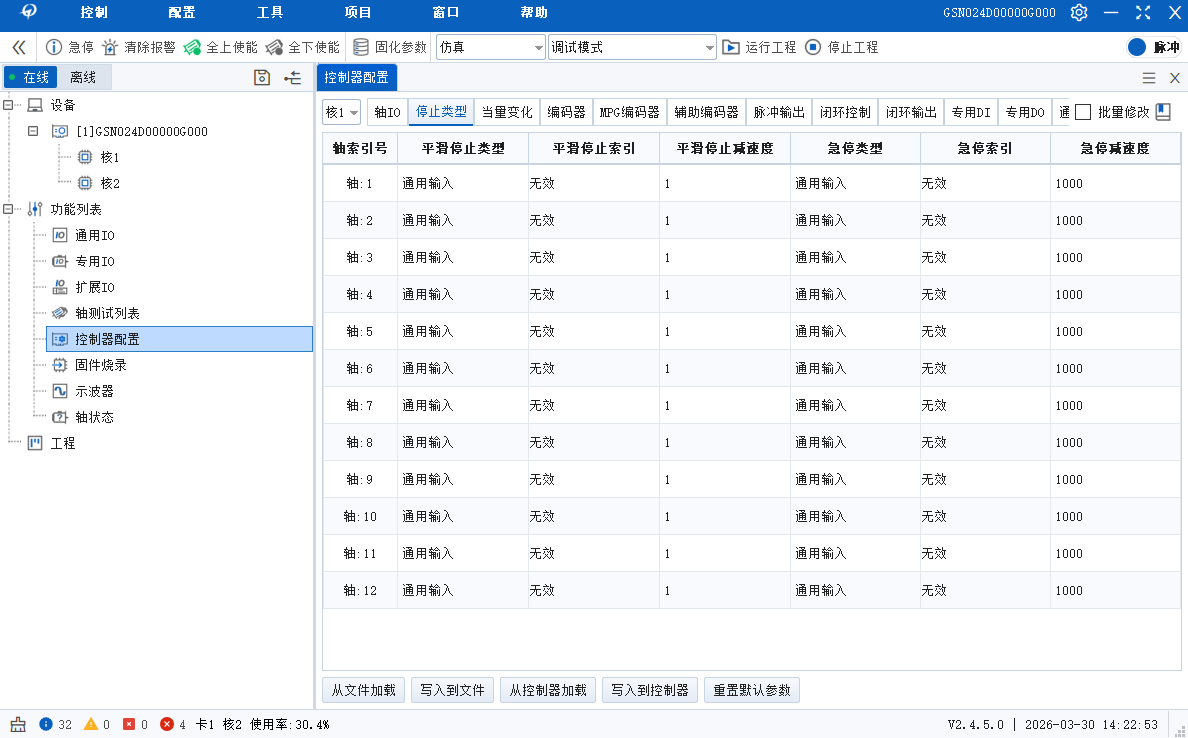
9. 上述回零方式中,触发反向或停止时所使用的减速度为通过规划器设置的轴急停减速度,用户可以通过MotionStudio的“控制器配置”页的“停止类型”项设置并保存成配置文件,调用GTN_LoadConfig下载配置文件使之生效,或在程序里面直接调用GTN_SetStopDec指令来设置。
1.4 回零方式详细说明¶
控制器现有回零方式对应的硬件触发信号如下表所示,用户可根据实际需求选择合适的回零方式。
| 回零方式 | 回零硬件信号 |
|---|---|
| 方式1 | 负限位+Index |
| 方式2 | 正限位+Index |
| 方式3,方式4,方式5,方式6 | Home+Index |
| 方式7,方式8,方式9,方式10 | Home+正限位+Index |
| 方式11,方式12,方式13,方式14 | Home+负限位+Index |
| 方式17 | 负限位 |
| 方式18 | 正限位 |
| 方式19,方式20,方式21,方式22 | Home |
| 方式23,方式24,方式25,方式26 | Home+正限位 |
| 方式27,方式28,方式29,方式30 | Home+负限位 |
| 方式33,方式34 | Index |
1.4.1 回零方式1¶
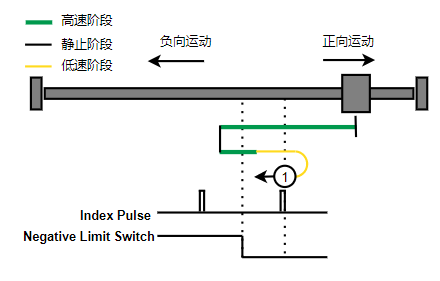
负向运动,不考虑Home开关,离开负限位后的第一个Index为零位。
1. 如果负限位没有触发,则往负向运动,触发到限位后反向运动,直到离开负限位后,第一个Index的位置就是零位(图示中负限位为高电平触发)。
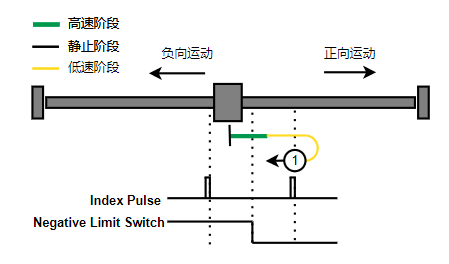
2. 如果刚开始就处于负限位上,则直接往正向运动,直到离开负限位后,第一个Index的位置就是零位。
1.4.2 回零方式2¶
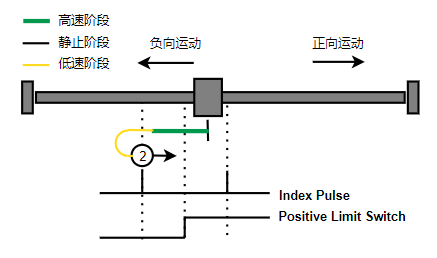
正向运动,不考虑Home开关,离开正限位后的第一个Index为零位。
1. 如果正限位没有触发,则往正向快速运动,触发到限位后低速反向运动,直到离开正限位后,第一个Index的位置就是零位。
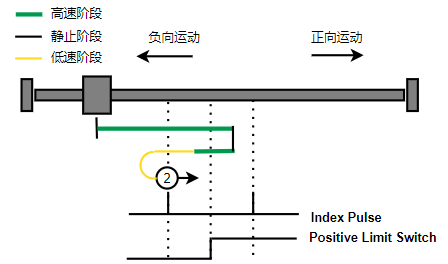
2. 如果刚开始就处于正限位上,则直接往负向运动,直到离开正限位后,第一个Index的位置就是零位。
1.4.3 回零方式3¶
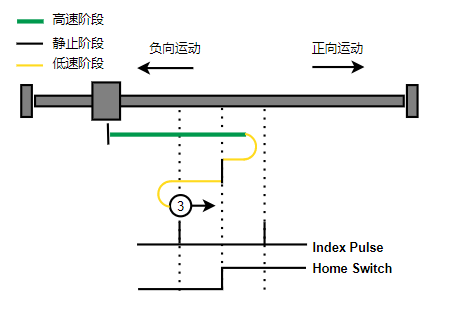
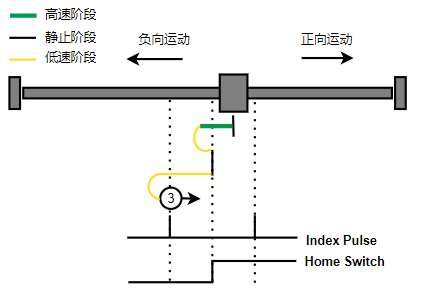
正向运动,Home左侧边沿的左侧第一个Index为零点。
1. Home未触发时,正向运动,Home左侧边沿触发后运动到触发位置,再向负向运动,碰到的第一个Index信号为零点。
启动回零时,Home未触发,捕获Home上升沿(用户可修改),捕获到Home开关,并停到捕获位置后,启动运动向Home的左侧(即负向)寻找Index,最终停在Index位置上。如图所示。
2. 如果刚开始就处于Home开关上,则往负向运动,Home左侧边沿触发后运动到触发位置,再向负向运动,碰到的第一个Index信号为零点。
3. 如果刚开始就处于正限位上,则无法运动,系统报错。
1.4.4 回零方式4¶
正向运动,Home+index,Home左侧边沿的右侧第一个Index为零点。
1. Home未触发时,正向运动,Home左侧边沿触发后运动到触发位置,再向正向运动,碰到的第一个Index信号为零点。
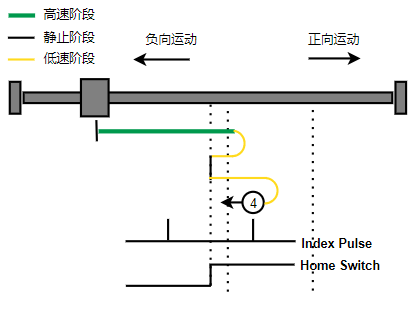
2. Home触发时,负向运动,Home左侧边沿触发后运动到触发位置,再向正向运动,碰到的第一个index信号为零点。
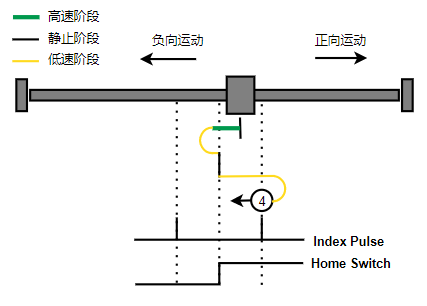
3. 如果刚开始就处于正限位上,则无法运动,系统报错。
1.4.5 回零方式5¶
负向运动,Home+Index,Home右侧边沿的右侧第一个Index为零点。
1. Home未触发时,负向运动,Home右侧边沿触发后运动到触发位置,再向正向运动,碰到的第一个Index信号为零点。
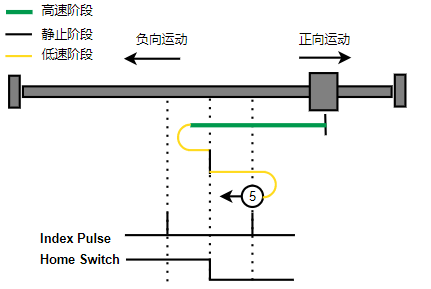
2. Home触发时,正向运动,Home右侧边沿触发后运动到触发位置,再向正向运动,碰到的第一个Index信号为零点。
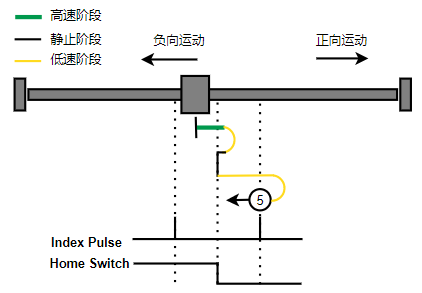
3. 如果刚开始就处于负限位上,则无法运动,系统报错。
1.4.6 回零方式6¶
负向运动,Home+Index,Home右侧边沿的左侧第一个Index为零点。
1. Home未触发时,负向运动,Home右侧边沿触发后运动到触发位置,再向负向运动,碰到的第一个Index信号为零点。
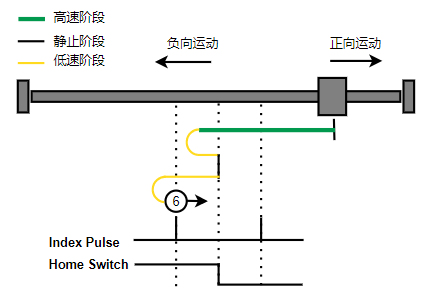
2. Home触发时,正向运动,Home右侧边沿触发后运动到触发位置,再向负向运动,碰到的第一个Index信号为零点。
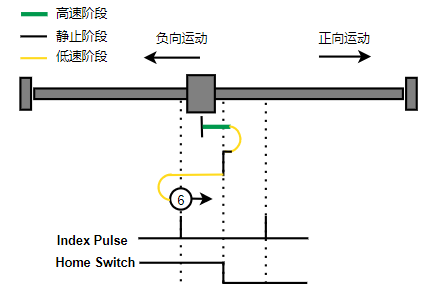
3. 如果刚开始就处于负限位上,则无法运动,系统报错。
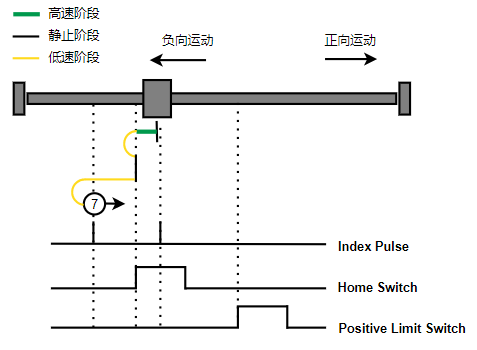
1.4.7 回零方式7¶
正向运动,Home+正限位+Index,Home信号左侧边沿的左侧第一个Index为零点。
1. Home和正限位均未触发,轴正向运动,Home左侧边沿先触发后回到触发位置后负向运动,Home左侧边沿的左侧的第一个index信号为零点。
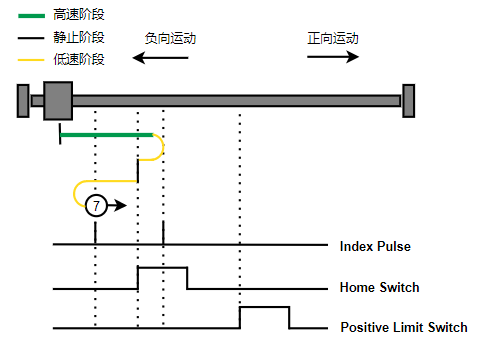
2. Home、正限位未触发,轴正向运动,正限位先触发后负向运动,Home左侧边沿先触发后回到触发位置后负向运动,Home左侧边沿的左侧的第一个Index信号为零点。
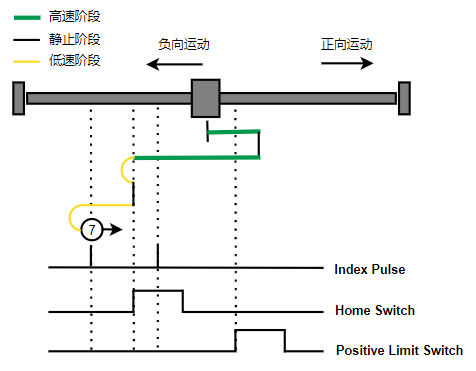
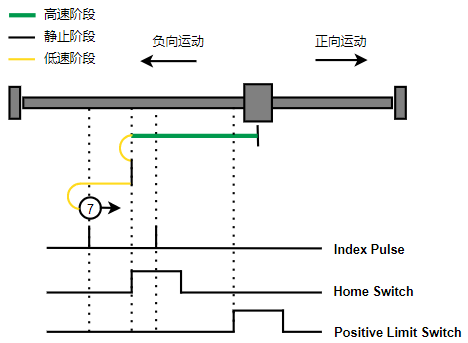
3. Home触发,正限位未触发,轴负向运动,Home左侧边沿触发后回到触发位置后负向运动,Home左侧边沿的的左侧的第一个Index信号为零点。
4. Home未触发,正限位触发,轴负向运动,Home左侧边沿触发后回到触发位置后负向运动,Home左侧边沿的的左侧的第一个Index信号为零点。
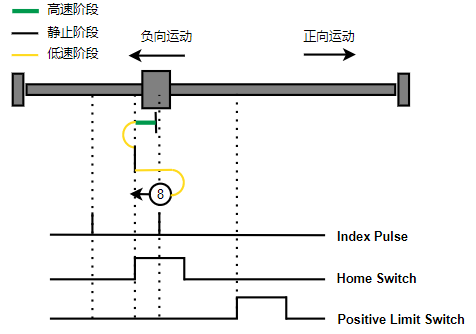
1.4.8 回零方式8¶
正向运动,Home+正限位+Index,Home信号左侧边沿的右侧第一个Index为零点。
1. Home和正限位均未触发,轴正向运动,Home左侧边沿先触发后回到触发位置后正向运动,Home左侧边沿的右侧的第一个Index信号为零点。
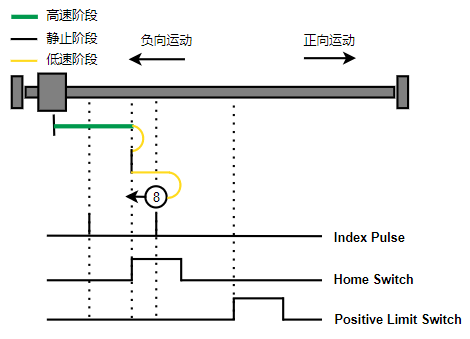
2.Home、正限位未触发,轴正向运动,正限位先触发后负向运动,Home左侧边沿先触发后回到触发位置后正向运动,Home左侧边沿的右侧的第一个Index信号为零点。
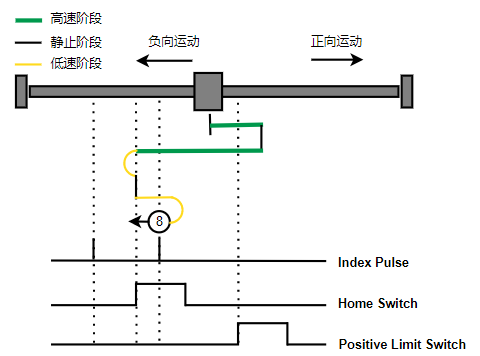
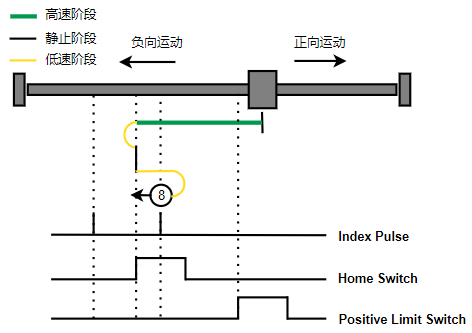
3. Home触发,正限位未触发,轴负向运动,Home左侧边沿触发后回到触发位置后正向运动,Home左侧边沿的的右侧的第一个Index信号为零点。
4. Home未触发,正限位触发,轴负向运动,Home左侧边沿触发后回到触发位置后正向运动,Home左侧边沿的的右侧的第一个Index信号为零点。
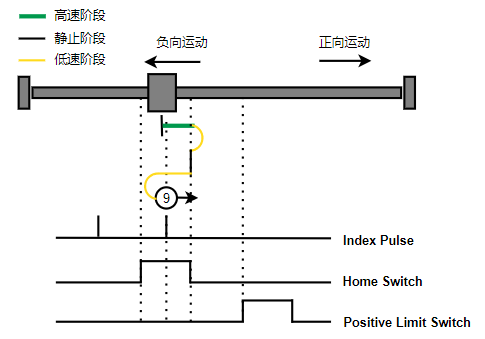
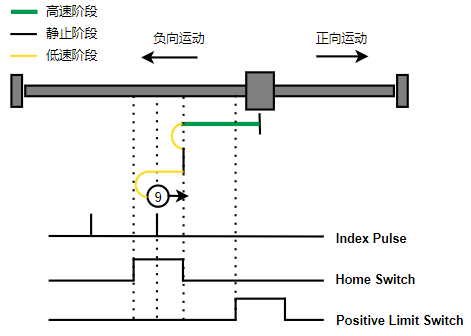
1.4.9 回零方式9¶
正向运动,Home+正限位+Index,Home信号右侧边沿的左侧第一个Index为零点。
1. Home和正限位均未触发,轴正向运动,Home右侧边沿先触发后回到触发位置后负向运动,Home右侧边沿的左侧的第一个Index信号为零点。
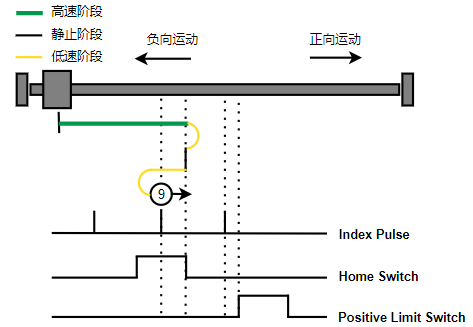
2. Home、正限位未触发,轴正向运动,正限位先触发后负向运动,Home右侧边沿先触发后回到触发位置后负向运动,Home右侧边沿的左侧的第一个Index信号为零点。
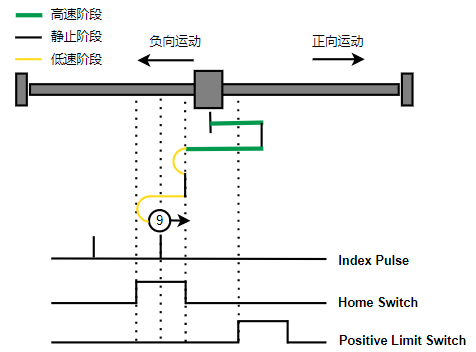
3. Home触发,正限位未触发,轴正向运动,Home右侧边沿触发后回到触发位置后负向运动,Home右侧边沿的的左侧的第一个Index信号为零点。
4. Home未触发,正限位触发,轴负向运动,Home右侧边沿触发后回到触发位置后负向运动,Home右侧边沿的的左侧的第一个Index信号为零点。
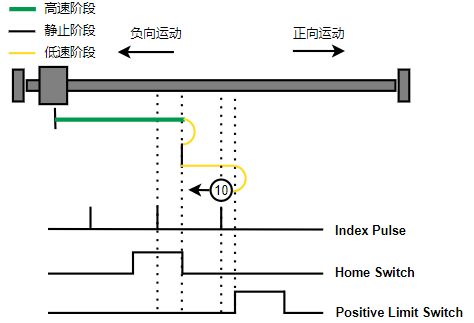
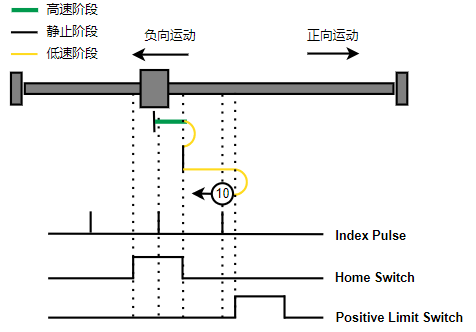
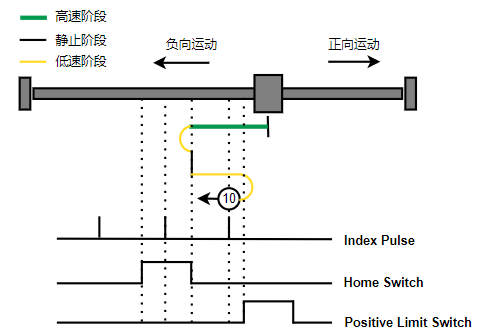
1.4.10 回零方式10¶
正向运动,Home+正限位+Index,Home信号右侧边沿的右侧第一个Index为零点。
1. Home和正限位均未触发,轴正向运动,Home右侧边沿先触发后回到触发位置后正向运动,Home左侧边沿的右侧的第一个Index信号为零点。
2.Home、正限位未触发,轴正向运动,正限位先触发后负向运动,Home右侧边沿先触发后回到触发位置后正向运动,Home右侧边沿的右侧的第一个Index信号为零点。
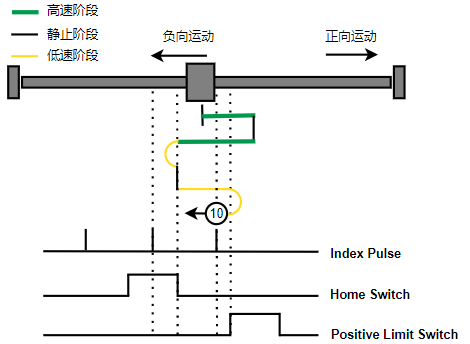
3. Home触发,正限位未触发,轴正向运动,Home右侧边沿触发后回到触发位置后正向运动,Home右侧边沿的的右侧的第一个Index信号为零点。
4. Home未触发,正限位触发,轴负向运动,Home右侧边沿触发后回到触发位置后正向运动,Home右侧边沿的的右侧的第一个Index信号为零点。
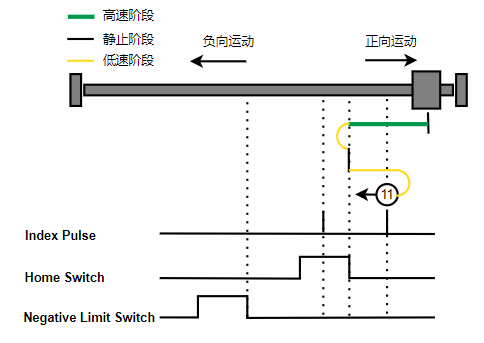
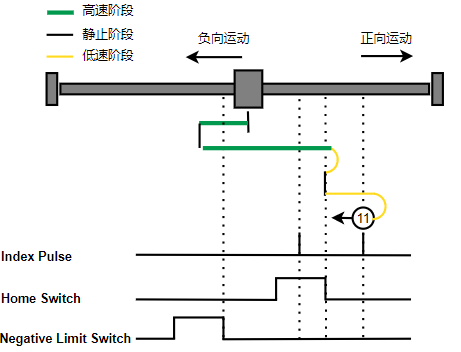
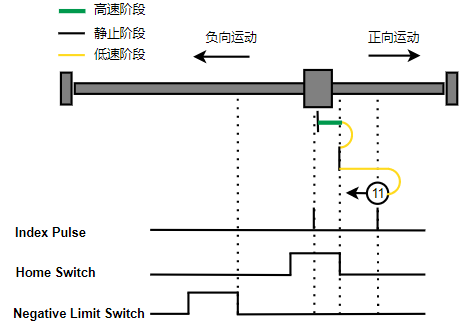
1.4.11 回零方式11¶
负向运动,Home+负限位+Index,Home信号右侧边沿的右侧第一个Index为零点。
1. Home和负限位均未触发,轴负向运动,Home右侧边沿先触发后回到触发位置后正向运动,Home右侧边沿的右侧的第一个Index信号为零点。
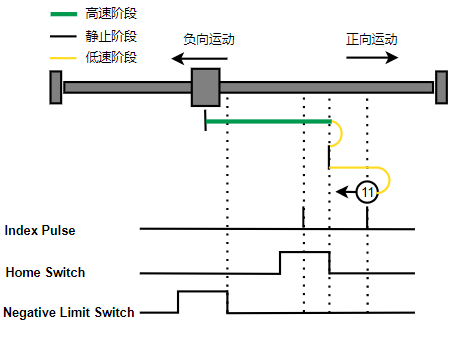
2. Home、负限位未触发,轴负向运动,负限位先触发后正向运动,Home右侧边沿先触发后回到触发位置后正向运动,Home右侧边沿的右侧的第一个Index信号为零点。
3. Home触发,负限位未触发,轴正向运动,Home右侧边沿触发后回到触发位置后正向运动,Home右侧边沿的的右侧的第一个Index信号为零点。
4. Home未触发,负限位触发,轴正向运动,Home右侧边沿触发后回到触发位置后正向运动,Home右侧边沿的的右侧的第一个Index信号为零点。
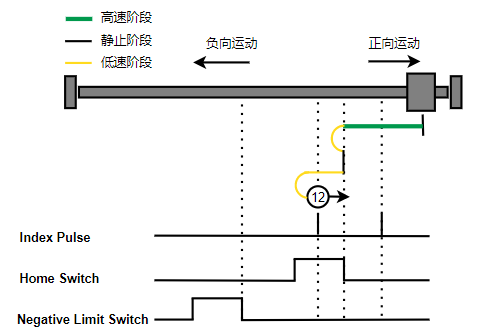
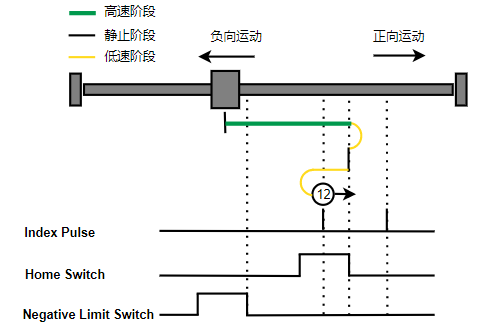
1.4.12 回零方式12¶
负向运动,Home+负限位+Index,Home信号右侧边沿的左侧第一个Index为零点。
1. Home和负限位均未触发,轴负向运动,Home右侧边沿先触发后回到触发位置后负向运动,Home右侧边沿的左侧的第一个Index信号为零点。
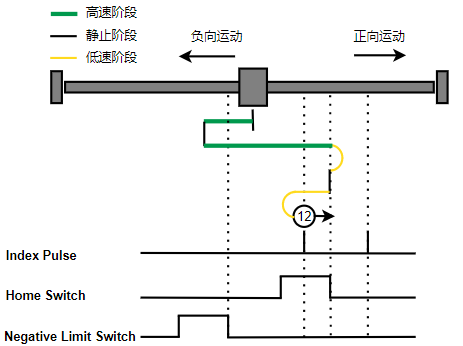
2.Home和负限位未触发,轴负向运动,负限位先触发后正向运动,Home右侧边沿先触发后回到触发位置后负向运动,Home右侧边沿的左侧的第一个Index信号为零点。
3. Home触发,负限位未触发,轴正向运动,Home右侧边沿触发后回到触发位置后负向运动,Home右侧边沿的的左侧的第一个Index信号为零点。
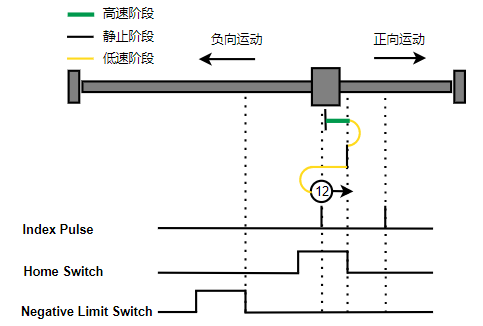
4. Home未触发,负限位触发,轴正向运动,Home右侧边沿触发后回到触发位置后负向运动,Home右侧边沿的的左侧的第一个Index信号为零点。
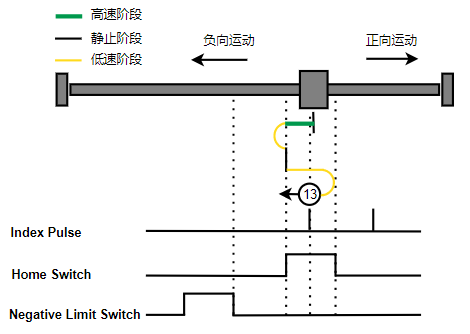
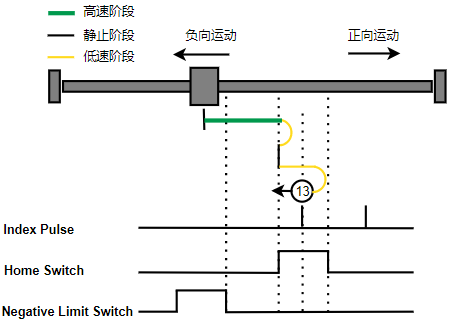
1.4.13 回零方式13¶
负向运动,Home+正限位+Index,Home信号左侧边沿的右侧第一个Index为零点。
1. Home和负限位均未触发,轴负向运动,Home左侧边沿先触发后回到触发位置后正向运动,Home左侧边沿的右侧的第一个Index信号为零点。
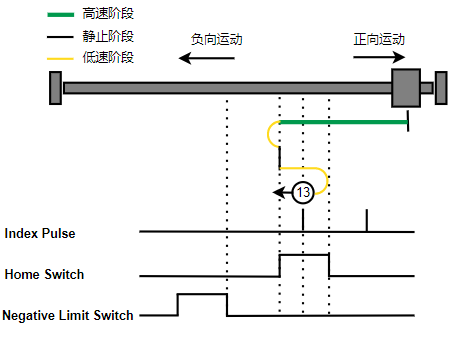
2. Home和负限位未触发,轴负向运动,负限位先触发后正向运动,Home左侧边沿先触发后回到触发位置后正向运动,Home左侧边沿的右侧的第一个Index信号为零点。
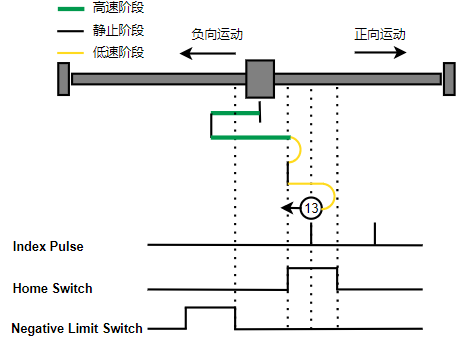
3. Home触发,负限位未触发,轴负向运动,Home左侧边沿触发后回到触发位置后正向运动,Home左侧边沿的的右侧的第一个Index信号为零点。
4. Home未触发,负限位触发,轴正向运动,Home左侧边沿触发后回到触发位置后正向运动,Home左侧边沿的的右侧的第一个Index信号为零点。
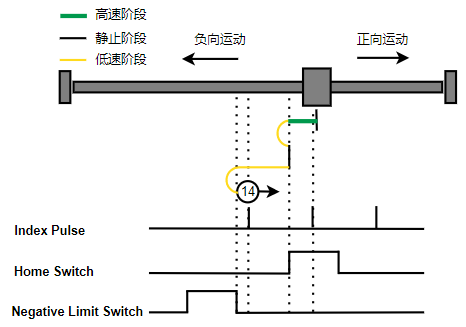
1.4.14 回零方式14¶
负向运动,Home+负限位+Index,Home信号左侧边沿的左侧第一个Index为零点。
1. Home和正限位均未触发,轴负向运动,Home左侧边沿先触发后回到触发位置后负向运动,Home左侧边沿的左侧的第一个Index信号为零点。
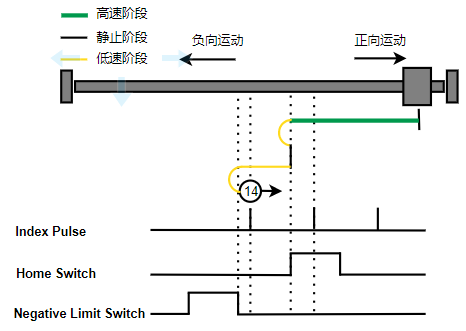
2.Home、负限位未触发,轴负向运动,负限位先触发后正向运动,Home左侧边沿先触发后回到触发位置后负向运动,Home左侧边沿的左侧的第一个Index信号为零点。
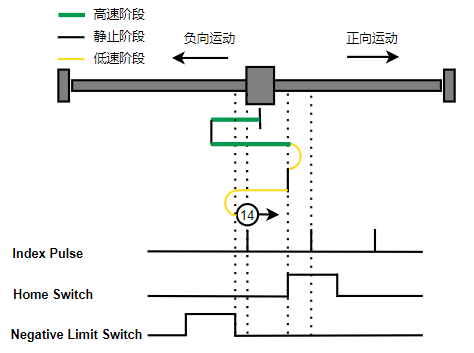
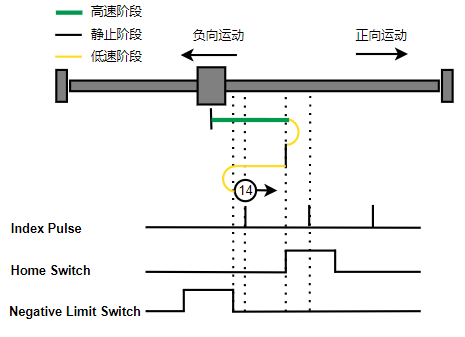
3. Home触发,负限位未触发,轴负向运动,Home左侧边沿触发后回到触发位置后负向运动,Home左侧边沿的的左侧的第一个Index信号为零点。
4. Home未触发,负限位触发,轴正向运动,Home左侧边沿触发后回到触发位置后负向运动,Home左侧边沿的的左侧的第一个Index信号为零点。
1.4.15 回零方式15¶
保留。
1.4.16 回零方式16¶
保留。
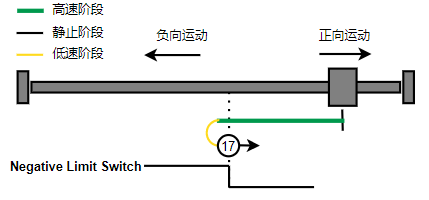
1.4.17 回零方式17¶
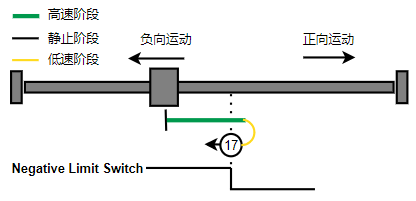
负限位触发时位置为零点。
1. 负限位未触发,轴往负向运动,负限位触发时为零点。
2. 负限位触发,轴往正向运动,脱离负限位时为零点。
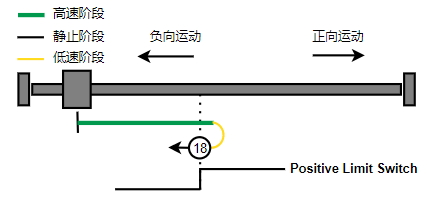
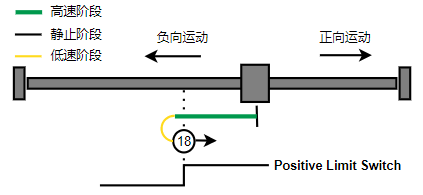
1.4.18 回零方式18¶
正限位触发时位置为零点。
1. 正限位未触发,轴往正向运动,正限位触发时为零点。
2. 正限位触发,轴往负向运动,脱离正限位时为零点。
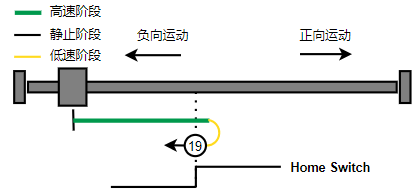
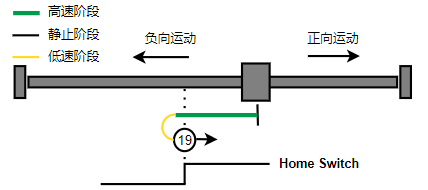
1.4.19 回零方式19¶
正向运动,Home信号触发位置或者脱离Home信号为零点。
1. Home未触发,轴往正向运动,Home触发时为零点。
2. Home触发,轴往负向运动,脱离Home时为零点。
1.4.20 回零方式20¶
和回零模式19一样,请参考模式19。正向运动,Home信号触发位置或者脱离Home信号为零点。
1.4.21 回零方式21¶
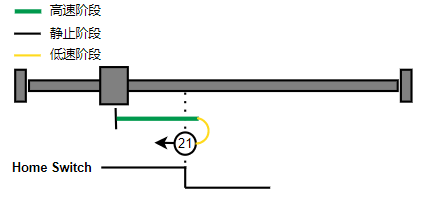
负向运动,Home信号触发位置或者脱离Home信号为零点。
1. Home未触发,轴往负向运动,Home触发时为零点。
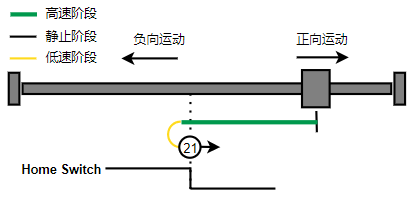
2. Home触发,轴往正向运动,脱离Home时为零点。
1.4.22 回零方式22¶
和回零模式21一样,请参考模式21。负向运动,Home信号触发位置或者脱离Home信号为零点。
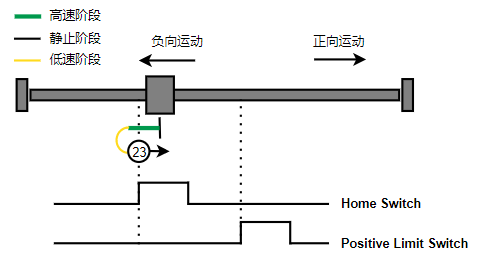
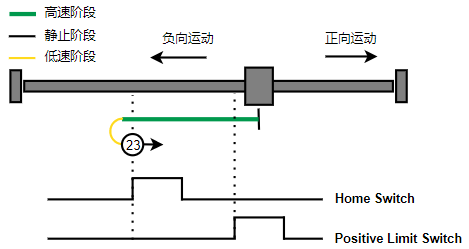
1.4.23 回零方式23¶
正向运动,Home+正限位,Home信号左侧边沿触发位置为零点。
1. Home和正限位均未触发,轴往正向运动,Home左侧边沿触发后回到触发位置,Home左侧边沿为零点。
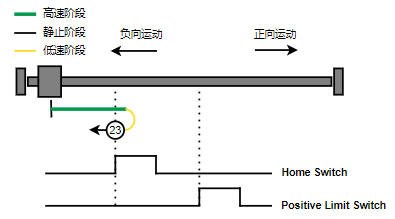
2. Home和正限位均未触发,轴往正向运动,正限位先触发后负向运动,Home左侧边沿触发后回到触发位置,Home左侧边沿为零点。
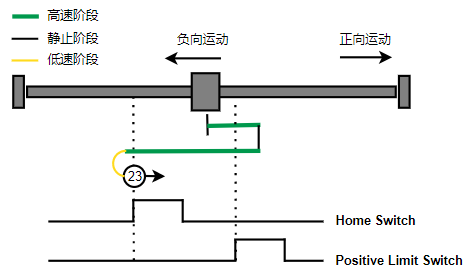
3. Home触发,正限位未触发,轴往负向运动,Home左侧边沿触发后回到触发位置,Home左侧边沿为零点。
4. Home未触发,正限位触发,轴往负向运动,Home左侧边沿触发后回到触发位置,Home左侧边沿为零点。
1.4.24 回零方式24¶
和回零模式23一样,请参考模式23。正向运动,Home+正限位,Home信号左侧边沿触发位置为零点。
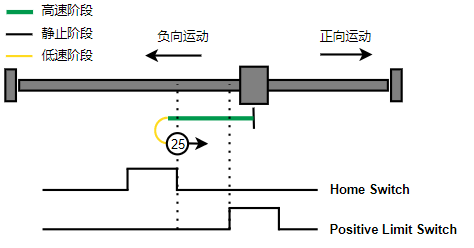
1.4.25 回零方式25¶
正向运动,Home+正限位,Home信号右侧边沿触发位置为零点。
1. Home和正限位均未触发,轴往正向运动,Home右侧边沿触发后回到触发位置,Home右侧边沿为零点。
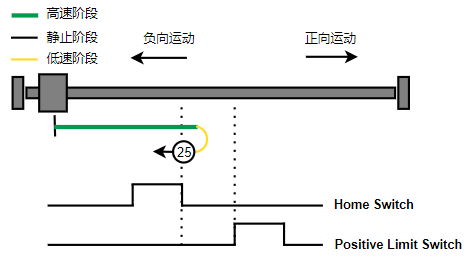
2. Home和正限位均未触发,轴往正向运动,正限位先触发后负向运动,Home右侧边沿触发后回到触发位置,Home右侧边沿为零点。
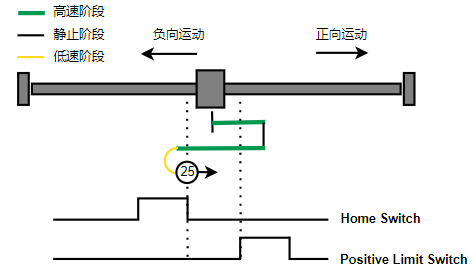
3. Home触发,正限位未触发,轴往正向运动,Home右侧边沿触发后回到触发位置,Home右侧边沿为零点。
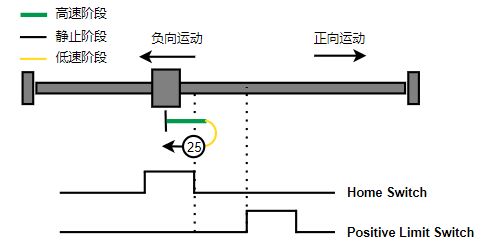
4. Home未触发,正限位触发,轴往负向运动,Home右侧边沿触发后回到触发位置,Home右侧边沿为零点。
1.4.26 回零方式26¶
和回零模式26一样,请参考模式26。正向运动,Home+正限位,Home信号右侧边沿触发位置为零点。
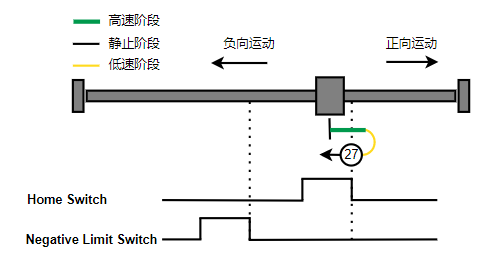
1.4.27 回零方式27¶
负向运动,Home+负限位,Home信号右侧边沿触发位置为零点。
1. Home和负限位均未触发,轴往负向运动,Home右侧边沿触发后回到触发位置,Home右侧边沿为零点。
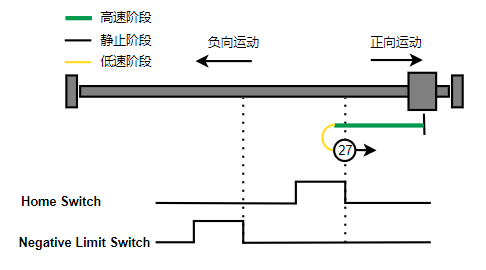
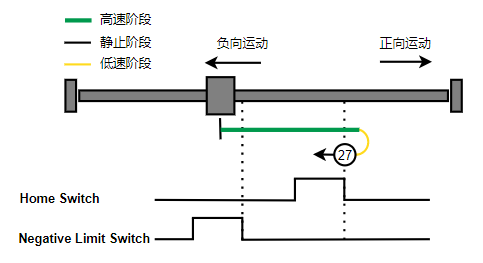
2. Home和负限位均未触发,轴往负向运动,负限位先触发后正向运动,Home右侧边沿触发后回到触发位置,Home右侧边沿为零点。
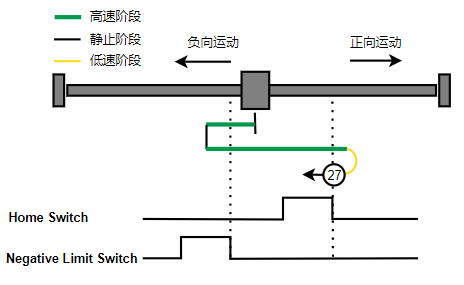
3. Home触发,负限位未触发,轴往正向运动,Home右侧边沿触发后回到触发位置,Home右侧边沿为零点。
4. Home未触发,负限位触发,轴往正向运动,Home右侧边沿触发后回到触发位置,Home右侧边沿为零点。
1.4.28 回零方式28¶
和回零模式27一样,请参考模式27。负向运动,Home+负限位,Home信号右侧边沿触发位置为零点。
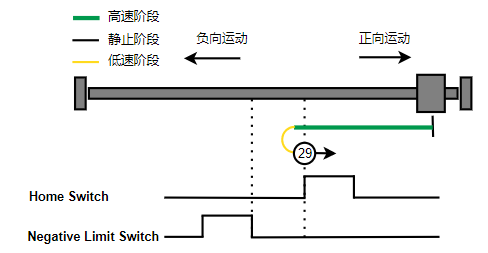
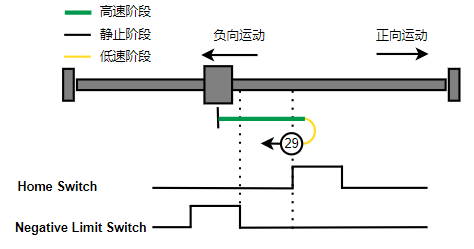
1.4.29 回零方式29¶
负向运动,Home+负限位,Home信号左侧边沿触发位置为零点。
1. Home和负限位均未触发,轴往负向运动,Home左侧边沿触发后回到触发位置,Home左侧边沿为零点。
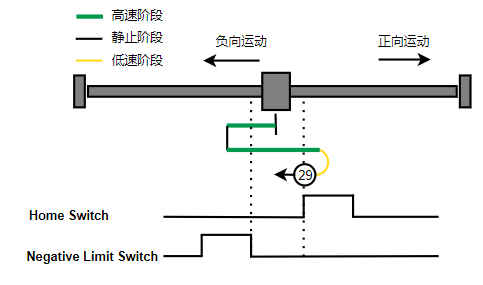
2. Home和负限位均未触发,轴往负向运动,负限位先触发后正向运动,Home左侧边沿触发后回到触发位置,Home左侧边沿为零点。
3. Home触发,负限位未触发,轴往负向运动,Home左侧边沿触发后回到触发位置,Home左侧边沿为零点。
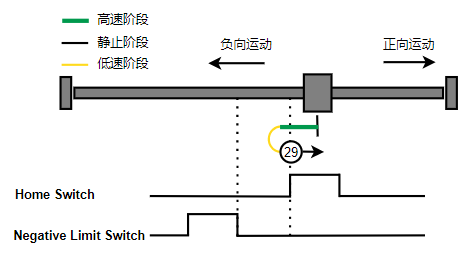
4. Home未触发,负限位触发,轴往正向运动,Home左侧边沿触发后回到触发位置,Home左侧边沿为零点。
1.4.30 回零方式30¶
和回零模式29一样,请参考模式29。负向运动,Home+负限位,Home信号左侧边沿触发位置为零点。
1.4.31 回零方式31¶
保留。
1.4.32 回零方式32¶
保留。
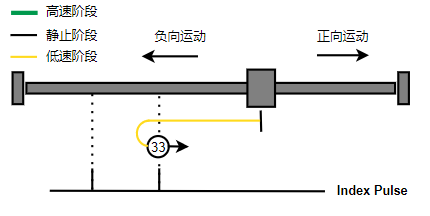
1.4.33 回零方式33¶
负向运动,第一个Index为零点。
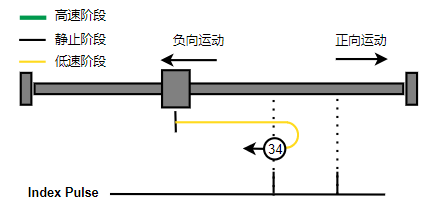
1.4.34 回零方式34¶
正向运动,第一个Index为零点。
1.4.35 回零方式35¶
当前位置作为零点。
1.4.36 回零方式36¶
保留。
1.5 回零方式例程¶
例程
回零方式3例程:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 | |