// StandardHome.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
// 该例程仅用于功能演示,请保证安全的情况下使用
// 测试功能:StandardHome示例
// 测试平台:网络型运动控制器
// 测试环境:Windows
// 测试流程:
// (1)初始化控制器
// (2)轴启动回零
// (3)运动完成,关闭控制器
// 注意事项:
// (1)本例程使用的“例程专用.xml”、“例程专用.cfg”,仅用于本例程
// (2)实际使用时,需要使用MotionStudio生成网络配置xml
// 加载固高运动控制库头文件
#include "gxn.h"
// 动态加载固高运动控制gxn.lib库
#pragma comment(lib,"gxn.lib")
/**
* @brief 指令出错打印函数
* @param command 打印信息字符串
* @param error 错误码
* @return 错误码
*/
short CommandHandler(char* command, short error)
{
printf("%s = %d\n", command, error);
getchar();
return error;
}
/**
* @brief 初始化运动控制器(开卡 + 初始化网络拓扑 + 初始化轴)
* @param core 需要初始化的核号,从1开始
* @param axis 需要初始化的轴起始索引,从1开始
* @param axisCount 需要初始化的轴数量,从起始索引axis开始计数,必须大于0
* @return 0表示初始化成功,非0表示初始化失败
*/
short InitMc(short core,short axis,short axisCount)
{
short rtn;
short overTime;
long status;
// 打开运动控制器
rtn = GTN_OpenCard(CHANNEL_PCIE,NULL,NULL);
if ( 0 != rtn )
{
return CommandHandler("GTN_OpenCard",rtn);
}
printf("Open Card Success !\n");
// 初始化网络
// 注意:(1)“例程专用.xml”仅用于本例程
// (2)实际使用时,需要使用MotionStudio生成对应的网络配置文件
// overTime:网络初始化超时时间,单位:秒
overTime = 120;
rtn = GTN_NetInit(NET_INIT_MODE_XML_STRICT,"例程专用.xml",overTime,&status);
if ( 0 != rtn )
{
printf("status = %d\n",status);
return CommandHandler("GTN_NetInit",rtn);
}
printf("Init Net Success !\n");
// 加载配置文件到控制器
// 注意:(1)“例程专用.cfg”仅用于本例程
// (2)实际使用时,需要使用MotionStudio生成对应的配置文件
rtn = GTN_LoadConfig(core,"例程专用.cfg");
if ( 0 != rtn )
{
return CommandHandler("GTN_LoadConfig(\"例程专用.cfg\")",rtn);
}
// 清除轴状态
rtn = GTN_ClrSts(core,axis,axisCount);
if ( 0 != rtn )
{
return CommandHandler("GTN_ClrSts",rtn);
}
printf("Init Mc Config Success !\n");
return rtn;
}
int _tmain(int argc, _TCHAR* argv[])
{
short rtn; // 指令返回值
short core; // 需要执行例程的运动控制器核号
short axis; // 需要初始化的轴起始索引号
short axisCount; // 需要初始化的轴数量,从轴起始索引号开始算起
TStandardHomePrm homePrm; // 回零运动参数
TStandardHomeStatus homeSts; // 回零状态
double prfPos; // 实时读取的规划位置
long axisSts; // 轴状态
unsigned long clock; // 控制器时钟
// 初始化运动控制器
// 开卡 + 初始化网络拓扑 + 初始化核1的1-8轴
core = 1;
axis = 1;
axisCount = 8;
rtn = InitMc(core,axis,axisCount);
if ( 0 != rtn )
{
return CommandHandler("InitMc",rtn);
}
// 轴上使能,如果需要测试实际驱动器、电机的运动,请将此注释代码打开
/*rtn = GTN_AxisOn(core,axis);
if (0 != rtn)
{
return CommandHandler("GTN_AxisOn", rtn);
}*/
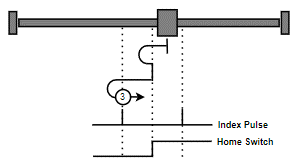
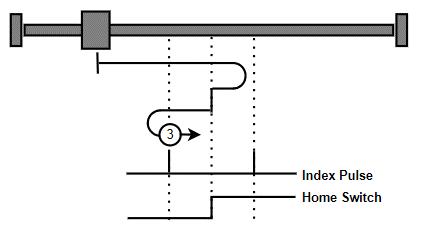
homePrm.mode = 3; // 正向运动,不考虑限位,Home开关左侧边沿后的左侧第一个Index为零点
homePrm.highSpeed = 10; // 搜索Home的速度,单位:pulse/ms
homePrm.lowSpeed = 5; // 搜索Index的速度,单位:pulse/ms
homePrm.acc = 1; // Home的加速度,单位:pulse/ms^2
homePrm.offset = 0; // 回零完成后的偏移量,单位:pulse
homePrm.check = 0; // 是否启动回零前的自检功能,即检验编码器和规划器运动1000pulse后是否到位
homePrm.autoZeroPos = 0; // 回零完成后是否自动清零
homePrm.motorStopDelay = 0; // 电机到位延时时间,单位:控制器的规划周期个数。
// 如果motorStopDelay = 0,规划运动完成后,采用编码器是否进入误差带的方式进行判断电机是否到位;
// 如果motorStopDelay > 0,规划运动完成后,采用等待motorStopDelay个规划周期个数后,再判断编码器器和规划差值是否是否小于5个脉冲,如果小于则认为编码器到位;
rtn = GTN_ExecuteStandardHome(core,axis,&homePrm);
// 读取轴运动状态
axisCount = 1;
do
{
// 读取轴的状态
rtn = GTN_GetSts(core,axis,&axisSts,axisCount,&clock);
if(0 != rtn)
{
CommandHandler("GTN_GetSts",rtn);
}
// 读取轴的规划位置
rtn = GTN_GetPrfPos(core,axis,&prfPos,axisCount,&clock);
if(0 != rtn)
{
CommandHandler("GTN_GetPrfPos",rtn);
}
// 读取轴的回零状态
rtn = GTN_GetStandardHomeStatus(core,axis,&homeSts);
if(0 != rtn)
{
CommandHandler("GTN_GetStandardHomeStatus",rtn);
}
//打印运动轴的状态及其规划位置值
printf("\r%-100s\r", ""); // 100个空格覆盖
switch(homeSts.stage)
{
case STANDARD_HOME_STAGE_IDLE:
printf("轴Axis %d ,轴状态sts=0x%-10lx 规划位置prfPos=%-10.1lf 未启动回零点\r", axis,axisSts,prfPos);
break;
case STANDARD_HOME_STAGE_START:
printf("轴Axis %d ,轴状态sts=0x%-10lx 规划位置prfPos=%-10.1lf 启动回零点\r", axis,axisSts,prfPos);
break;
case STANDARD_HOME_STAGE_SEARCH_LIMIT:
printf("轴Axis %d ,轴状态sts=0x%-10lx 规划位置prfPos=%-10.1lf 寻找限位\r", axis,axisSts,prfPos);
break;
case STANDARD_HOME_STAGE_LEAVE_LIMIT:
printf("轴Axis %d ,轴状态sts=0x%-10lx 规划位置prfPos=%-10.1lf 脱离限位\r", axis,axisSts,prfPos);
break;
case STANDARD_HOME_STAGE_TRY_HOME_LIMIT:
printf("轴Axis %d ,轴状态sts=0x%-10lx 规划位置prfPos=%-10.1lf 搜索到Home或者限位\r", axis,axisSts,prfPos);
break;
case STANDARD_HOME_STAGE_SEARCH_HOME:
printf("轴Axis %d ,轴状态sts=0x%-10lx 规划位置prfPos=%-10.1lf 正在搜索Home\r", axis,axisSts,prfPos);
break;
case STANDARD_HOME_STAGE_RETURN_HOME :
printf("轴Axis %d ,轴状态sts=0x%-10lx 规划位置prfPos=%-10.1lf 运动到捕获位置=%ld\r", axis,axisSts,prfPos,homeSts.capturePos);
break;
case STANDARD_HOME_STAGE_RETURN_HOME_WAIT_STOP:
printf("轴Axis %d ,轴状态sts=0x%-10lx 规划位置prfPos=%-10.1lf 等待运动停止\r", axis,axisSts,prfPos);
break;
case STANDARD_HOME_STAGE_SEARCH_INDEX:
printf("轴Axis %d ,轴状态sts=0x%-10lx 规划位置prfPos=%-10.1lf 正在搜索Index\r", axis,axisSts,prfPos);
break;
case STANDARD_HOME_STAGE_GO_HOME:
printf("轴Axis %d ,轴状态sts=0x%-10lx 规划位置prfPos=%-10.1lf 正在运动到零点\r", axis,axisSts,prfPos);
break;
case STANDARD_HOME_STAGE_END:
printf("轴Axis %d ,轴状态sts=0x%-10lx 规划位置prfPos=%-10.1lf 回零点结束\r", axis,axisSts,prfPos);
break;
case STANDARD_HOME_STAGE_START_CHECK:
printf("轴Axis %d ,轴状态sts=0x%-10lx 规划位置prfPos=%-10.1lf 启动回零点前自检\r", axis,axisSts,prfPos);
break;
case STANDARD_HOME_STAGE_CHECKING:
printf("轴Axis %d ,轴状态sts=0x%-10lx 规划位置prfPos=%-10.1lf 启动回零点前自检中\r", axis,axisSts,prfPos);
break;
}
if((0 == homeSts.run) && ( 0 != homeSts.error))
{
printf("\r\n");
printf("轴回零状态 %d\r\n", homeSts.run);
printf("轴回零阶段 %d\r\n", homeSts.stage);
printf("轴回零阶段错误信息 %d\r\n", homeSts.error);
break;
}
// 规划器处于运动状态时bit10为1
}while( 0x400 == (axisSts & 0x400) ); // 规划到位后退出循环
// 轴规划完成后,下使能(默认代码屏蔽,接实际电机时才调用)
// 轴下使能,如果需要测试实际驱动器、电机的运动,请将此注释代码打开
/* rtn = GTN_AxisOff(core,axis);
if (0 != rtn)
{
return CommandHandler("GTN_AxisOff", rtn);
}*/
// 关闭控制器
rtn = GTN_Close();
if ( 0 != rtn )
{
return CommandHandler("GTN_Close",rtn);
}
printf("Press Any Key To Exit !\n");
getchar();
return 0;
}