// WaveformPair.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
// 该例程仅用于功能演示,请保证安全的情况下使用
// 测试功能:波形控制两路输出功能示例
// 测试平台:网络型运动控制器
// 测试环境:Windows
// 测试流程:
// (1)初始化控制器
// (2)关闭波形控制输出
// (3)设置波形控制数据
// (4)使能波形控制输出
// (5)输出过程中设置其中一路输出无效
// (6)输出完成,关闭控制器
// 注意事项:
// (1)本例程使用的“例程专用.xml”、“例程专用.cfg”,仅用于本例程
// (2)实际使用时,需要使用MotionStudio生成网络配置xml
// (3)实际使用时,必须确认网络上接了支持波形控制功能的从站!!!
// 加载固高运动控制库头文件
#include "gxn.h"
// 动态加载固高运动控制gxn.lib库
#pragma comment(lib,"gxn.lib")
/**
* @brief 指令出错打印函数
* @param command 打印信息字符串
* @param error 错误码
* @return 错误码
*/
short CommandHandler(char* command, short error)
{
printf("%s = %d\n", command, error);
getchar();
return error;
}
/**
* @brief 初始化运动控制器(开卡 + 初始化网络拓扑 + 初始化轴)
* @param core 需要初始化的核号,从1开始
* @param axis 需要初始化的轴起始索引,从1开始
* @param axisCount 需要初始化的轴数量,从起始索引axis开始计数,必须大于0
* @return 0表示初始化成功,非0表示初始化失败
*/
short InitMc(short core,short axis,short axisCount)
{
short rtn;
short overTime;
long status;
// 打开运动控制器
rtn = GTN_OpenCard(CHANNEL_PCIE,NULL,NULL);
if ( 0 != rtn )
{
return CommandHandler("GTN_OpenCard",rtn);
}
printf("Open Card Success !\n");
// 初始化网络
// 注意:(1)“例程专用.xml”仅用于本例程
// (2)实际使用时,需要使用MotionStudio生成对应的网络配置文件
// overTime:网络初始化超时时间,单位:秒
overTime = 120;
rtn = GTN_NetInit(NET_INIT_MODE_XML_STRICT,"例程专用.xml",overTime,&status);
if ( 0 != rtn )
{
printf("status = %d\n",status);
return CommandHandler("GTN_NetInit",rtn);
}
printf("Init Net Success !\n");
// 加载配置文件到控制器
// 注意:(1)“例程专用.cfg”仅用于本例程
// (2)实际使用时,需要使用MotionStudio生成对应的配置文件
rtn = GTN_LoadConfig(core,"例程专用.cfg");
if ( 0 != rtn )
{
return CommandHandler("GTN_LoadConfig(\"例程专用.cfg\")",rtn);
}
// 清除轴状态
rtn = GTN_ClrSts(core,axis,axisCount);
if ( 0 != rtn )
{
return CommandHandler("GTN_ClrSts",rtn);
}
printf("Init Mc Config Success !\n");
return rtn;
}
#define WAVEFORM_DATA_COUNT_MAX (50)
int _tmain(int argc, _TCHAR* argv[])
{
short rtn; // 指令返回值
short core; // 需要执行例程的运动控制器核号
short axis; // 需要初始化的轴起始索引号
short axisCount; // 需要初始化的轴数量,从轴起始索引号开始算起
// 初始化运动控制器
// 开卡 + 初始化网络拓扑 + 初始化核1的1-8轴
core = 1;
axis = 1;
axisCount = 8;
rtn = InitMc(core,axis,axisCount);
if ( 0 != rtn )
{
return rtn;
}
short i;
short index; // 波形控制索引
short dataCount; // 波形控制第二路输出数据个数
short loopCount; // 波形控制数据循环次数
double voltage[WAVEFORM_DATA_COUNT_MAX];
// 波形控制第二路输出数据数组
TRectangleWavePrm rectWavePrm; // 波形控制矩形波描述参数结构体
TWaveformOutput rectOutput; // 波形控制矩形波输出口描述结构体参数
TWaveformOutput output; // 波形控制第二路输出口描述结构体参数
TWaveformPairStatus status; // 波形控制两路输出状态结构体
memset(voltage,0,sizeof(voltage));
memset(&rectWavePrm,0,sizeof(rectWavePrm));
memset(&rectOutput,0,sizeof(rectOutput));
memset(&output,0,sizeof(output));
memset(&status,0,sizeof(status));
// 先关闭波形输出
index = 1;
rtn = GTN_EnableWaveformPair(core,index,0,0,0);
if( 0 != rtn )
{
return CommandHandler("GTN_EnableWaveform",rtn);
}
// 填写波形输出参数
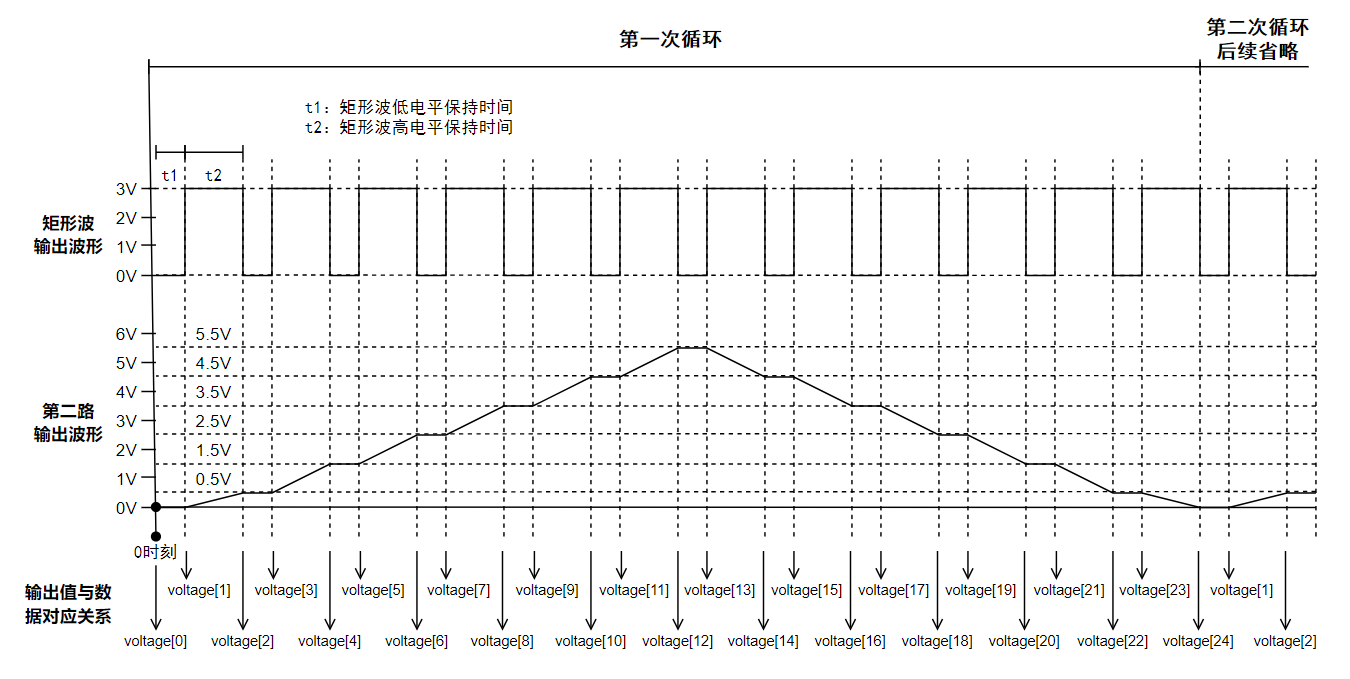
i = 0;
voltage[i] = voltage[i+1] = 0.0;i+=2;
voltage[i] = voltage[i+1] = 0.5;i+=2;
voltage[i] = voltage[i+1] = 1.5;i+=2;
voltage[i] = voltage[i+1] = 2.5;i+=2;
voltage[i] = voltage[i+1] = 3.5;i+=2;
voltage[i] = voltage[i+1] = 4.5;i+=2;
voltage[i] = voltage[i+1] = 5.5;i+=2;
voltage[i] = voltage[i+1] = 4.5;i+=2;
voltage[i] = voltage[i+1] = 3.5;i+=2;
voltage[i] = voltage[i+1] = 2.5;i+=2;
voltage[i] = voltage[i+1] = 1.5;i+=2;
voltage[i] = voltage[i+1] = 0.5;i+=2;
voltage[i] = 0.0;i+=1;
dataCount = i;
if ( dataCount > WAVEFORM_DATA_COUNT_MAX )
{
return CommandHandler("Voltage Data Overflow",dataCount);
}
loopCount = 50;
rectWavePrm.startMode = RECTANGLE_WAVE_START_MODE_LOW_LEVEL;
// 矩形波输出模式,定义启动输出后的行为:
// 0:启动输出后先输出低电平,再输出高电平
// 1:启动输出后先输出高电平,再输出低电平
rectWavePrm.voltage = 3.0; // 矩形波输出高电平对应的电压值,取值范围:(0,10],单位:V
rectWavePrm.highLevelTime = 4; // 矩形波输出高电平(输出值为voltage)保持时间,必须大于0,单位:ms
rectWavePrm.lowLwvelTime = 2; // 矩形波输出低电平(输出值为0V)保持时间,必须大于0,单位:ms
// 设置波形控制数据
rtn = GTN_SetWaveformPairPrm(core,index,&rectWavePrm,voltage,dataCount,loopCount);
if( 0 != rtn )
{
return CommandHandler("GTN_SetWaveformPairPrm",rtn);
}
printf("Set Waveform Pair Parameter Success !\n");
// 设置输出口
rectOutput.type = MC_LASER_AO;
rectOutput.index = 1;
rectOutput.laserOn = 0;
output.type = MC_AU_DAC;
output.index = 1;
output.laserOn = 1;
// 使能波形控制输出
rtn = GTN_EnableWaveformPair(core,index,&rectOutput,&output,1);
if( 0 != rtn )
{
return CommandHandler("GTN_EnableWaveformPair",rtn);
}
printf("Enable Waveform Pair Success !\n");
do
{
rtn = GTN_GetWaveformPairStatus(core,index,&status);
if( CMD_SUCCESS != rtn )
{
return CommandHandler("GTN_GetWaveformPairStatus",rtn);
}
printf("waveform = %d, enable = %d, loopCount = %d, outputValue = %lf\r",
index,status.enable,status.loopCount,status.outputVoltage);
} while ( status.loopCount <= (loopCount/2) );
printf("\n");
// 设置第二路输出无效
rtn = GTN_SetWaveformPairOutputValid(core,index,&output,0);
if( 0 != rtn )
{
return CommandHandler("GTN_SetWaveformPairOutputValid",rtn);
}
printf("Set Waveform Pair Output Valid Success !\n");
do
{
rtn = GTN_GetWaveformPairStatus(core,index,&status);
if( CMD_SUCCESS != rtn )
{
return CommandHandler("GTN_GetWaveformPairStatus",rtn);
}
printf("waveform = %d, enable = %d, loopCount = %d, outputValue = %lf\r",
index,status.enable,status.loopCount,status.outputVoltage);
} while ( status.enable );
printf("\nWaveform Pair Finish !\n");
// 关闭控制器
rtn = GTN_Close();
if ( 0 != rtn )
{
return CommandHandler("GTN_Close",rtn);
}
printf("Press Any Key To Exit !\n");
getchar();
return 0;
}